
A unique GNSS hardware and software-as-a-service (SaaS) combination provides very affordable high-precision—on an as-needed basis
The Trimble DA2 + Catalyst solution is a welcome update on the original solution, first offered in 2017. I tested it then and was quite intrigued by the creativity of the solution, and recently had an opportunity to take the new model for a test drive. Spoiler: it pretty much matches the performance of high-end survey-grade rovers. But with some qualifiers…
To achieve high precision GNSS results, namely centimeter-grade positions in real-time, traditionally requires a substantial initial investment in a dedicated high-end survey-grade GNSS rover. These can cost from thousands to tens of thousands of dollars (USD). Then you need a corrections source: base-rover or other real-time kinematics (RTK, network RTK (NRTK/RTN), or precise point positioning (PPP, delivered by L-Band satellites or the internet).
This model is being bucked by Trimble’s DA2 + Catalyst (and its predecessor, the DA1). The only up-front investment is the DA2 antenna that retails for under $400 (USD). You need to add a good quality field pole, and a battery (more on that later). High precision is enabled with a Trimble Catalyst subscription, which includes in the price two types of correction source. You can operate this from your smartphone or tablet, and it delivers high precision positions to field applications.

How it Works
A key departure from a dedicated-rover model is that Catalyst is operating on a “software defined receiver”. GNSS rovers have traditionally incorporated ASICs (application specific integrated circuit) on the GNSS board inside. An SDR can do the same processing without the dedicated hardware, they just need a processor or set of processors that can handle it. In the DA1 + Catalyst solution, the SDR was loaded into the processors of your smartphone; the update has taken this a step further (more on that later). SDRs have been talked about in GNSS development circles for more than a decade, and indeed there are GNSS SDRs that can be loaded into workstations, laptops or capable mobile devices. But, as far as I’ve been able to determine, the 2017 version was an early, if not the first, commercial offerings of such a solution for a survey/mapping rover. I had been waiting a long time to see this and was pleased to see how well it performed during tests against high end rovers.
The new version takes this solution a leap forward and has solved some of the operational challenges. The first version used the processors in compatible smart phones, though limited to some newer Android devices. There was also a cumbersome cable connecting the antenna to the phone/tablet. Working with ever evolving phone operating systems presented a persistent development challenge, e.g., an iPhone was not doable. What an SDR needs is sufficient processing power, and the new solution puts the processors in the DA2 antenna. This means it can be used with any device that can run the thin client Trimble Mobile Manager (TMM) app. And it eliminates the cable, as it is operated by Bluetooth.
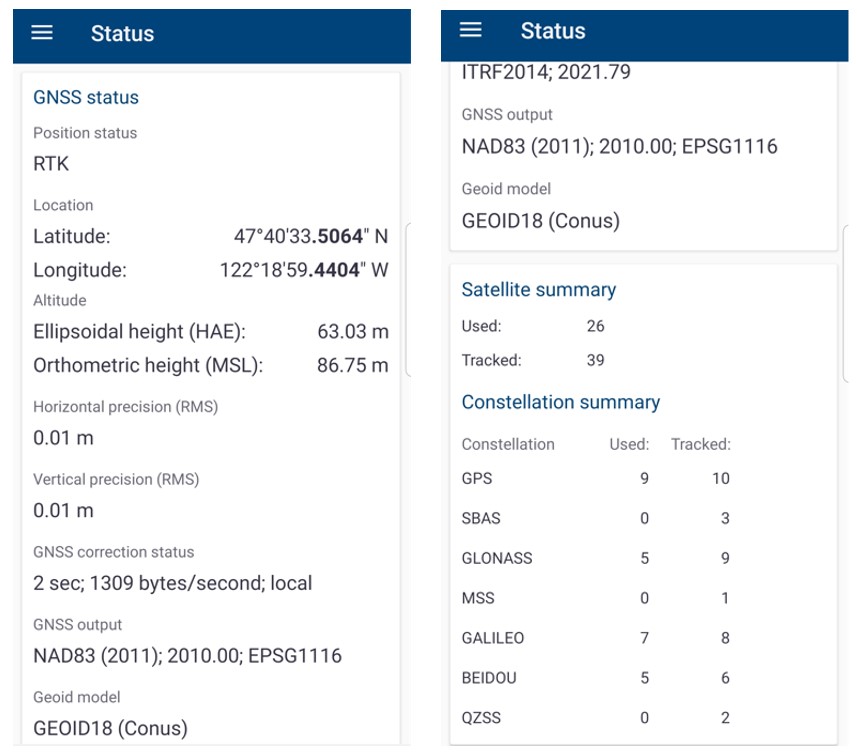
Probably the biggest leap forward in the upgraded version is in RTK horsepower. It now runs the Trimble ProPoint RTK engine, the very same one in Trimble’s top-end R10-2/R12/R12i rovers. This enables it to mix and match satellites (and multiple signals) from each of the constellations: GPS, Glonass, Galileo, Beidou, QZSS, etc. In the test drive (per the TMM status) I was tracking 36-39 satellites and using 24-26 or more in solution; much the same as I see in those new high-end survey rovers.
Subscriptions and Correction Sources
Essentially, you are “renting” the high precision GNSS SDR that runs in the DA2 antenna and operating it from the mobile device of your choice.
Catalyst is offered in tiered subscription packages, depending on the precision you need for your work—and these include access to real-time correction services. For many kinds of GIS mapping, you could choose Catalyst 60 (60cm, or about 2 feet), Catalyst 30 (30cm or about a foot). Or for more precise asset mapping/inventory/survey, there is Catalyst 10 (10 cm or about 4 inches) or go all-in for centimeter precision with Catalyst 1.
For my test drive, I opted for the centimeter option, in which you can buy bundles of one hour each in advance (for about $10 USD per hour) and use them as needed (they expire after a year). Or, there are all-you-can-eat plans that I understand will run about $400 USD per month, or $4,000 USD annually.
With Catalyst subscriptions you get access to the Trimble Corrections Hub. This includes PPP and NRTK (where available). If you are working in a region that has a Trimble VRS Now real-time network (that covers many areas of North America, Europe, and Australia/New Zealand), it will default to that first, and if not it will connect to Trimble’s CenterPoint RTX PPP service (via internet or L-Band satellite) which covers most of the globe except some of the higher arctic latitudes. You can choose local sources via IP or NTRIP; local NTRK/RTN or IP-enabled bases. Some surveyors with base-rover RTK are now using IP-based delivery of their corrections (where there is cell coverage), to overcome the distance limits of their UHF or spread-spectrum radios. This solution could work in that scenario as well.
Operation
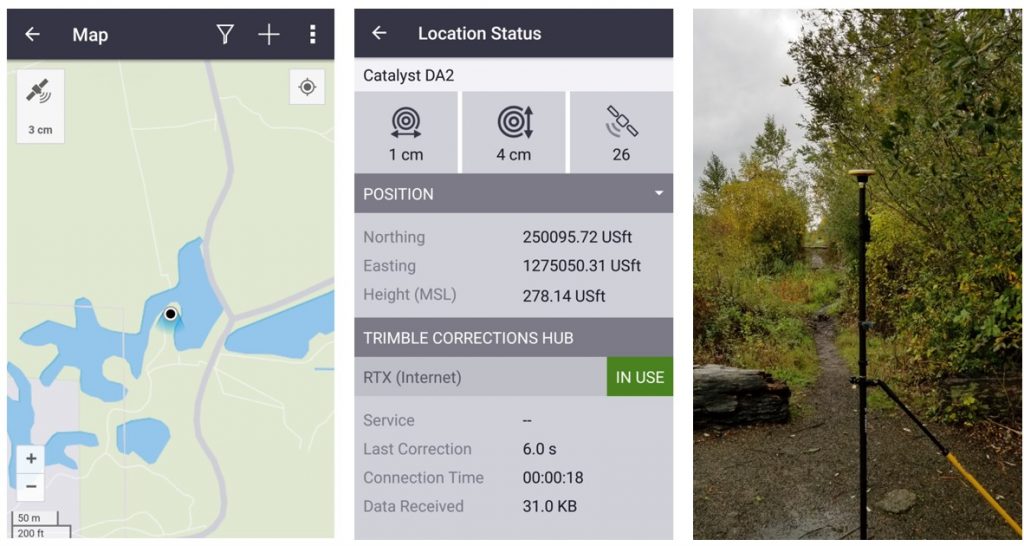
You can mount the DA2 on any standard field pole. There is an adapter that screws on standard 5/8×11 threads, then you slip the DA2 onto this yellow adapter. Next, you need to attach a battery to the pole, below the antenna and connect it via a short USB cable. The unit I tested had a nice adjustable strap to attach a battery bank.
One of the first things folks wonder about when looking at a new rover is how long the battery will last. This is a bit moot with this system as you can use almost any off-the-shelf battery bank. Buy a large one or carry several. No more exorbitantly priced proprietary batteries… digging it! The test kit battery was good for about 6 hours.
Once hooked up, you hit the button on the DA2 and pair it to your phone or tablet, same as you would with any other peripheral. You install the free TMM app on your device, open it, and log in to your Catalyst account to access your subscription/credits. As the session starts up, the satellites are acquired by the antenna, and the corrections start flowing. By default, it will choose the VRS Now corrections first (if available), if not, it will acquire and use Trimble RTX corrections. You can choose your local corrections source in TMM if you’d prefer that. TMM shows that status: positions in lat/long, satellites used, and position quality.
But the field user is likely wanting to use a field data collection software. At this time, the DA2 + Catalyst can port positions directly to field apps like Trimble TerraFlex, Penmap, and Esri ArcGIS Field Maps. There is also the Trimble Precision SDK (software developers kit) so the data from Catalyst can be integrated into other apps; there are already several developers working with this. Like apps specifically designed for wetland delineation, and underground utility visualization. Some SDK developers are simply building localized mapping and data collection solutions specific to the requirements of a regional market. Some ideas for surveying could be an app for monumentation: search, recovery, update and additions, or for UAS ground control point work; porting the data directly to the UAS project and processing apps.
I tried out TerraFlex paired with the system. For the on-demand license workflow, the first step was opening TMM to access the subscription, then close TMM, open TerraFlex, connect it to the DA2, choose the corrections source, and geodetic reference framework. It seemed a little clunky at first, but once I got used to it, it did not dd up to more steps than I usually have to do with a dedicated rover and field software. For an all-you-can-eat monthly/annual plan you do not have to do that first step every time. As many of the younger folks in geospatial fields have grown up in a world of apps, mobile devices, peripherals, and subscription services, such a system and its operation will probably come as second nature.
With the other field apps, operation appears to be as simple. While it seems that the primary market for this system at this time is the mapping community, there are enough basic functions in Penmap to support many surveying workflows. And I think it is just a short matter of time before we see full surveying apps connected via the SDK. I have also seen widespread use of the original system paired with Trimble SiteVision (a kind of field augmented reality system for design and construction).
Test Drive
For GNSS or other surveying instrument test drives, I visit a nearby National Geodetic Survey Calibration Baseline. I do repeated observations on two of the published calibration marks and check the inverses. I’ve also set test marks, with a total station and level, adjacent to the baseline under varied levels of tree canopy. The baseline is in an area that does not have VRS Now, so the system defaulted to RTX, and I also changed to local correction sources for single-base RTK (about 5km away) and NRTK (VRS).
The inverses over the 430 meters between two of the calibration marks came in within a centimeter via all 3 sources. Over the past few years, one of the marks has become a bit overgrown and is now under moderate canopy, and the other is under light canopy. The performance for the system was the same as a new high-end rover (four constellations), and an older rover (circa 2010; GPS+GLN) I brought along. The baseline is within an area that has Fast RTX, so the convergence time was under a minute, but a little longer at the moderate canopy mark.

At an adjacent mark under heavy canopy, the older rover could not fix, but the new rover and DA2 + Catalyst could in RTK and VRS mode. All were within 2 cm horizontal and 3 cm vertical. RTX took several minutes but was able to get to 3 cm horizontal and 5 cm vertical. In short, the DA2 + Catalyst matched the new rover in performance out in the open with RTK and VRS, and both were much better than the old rover in any of the canopy scenarios. This makes sense: more satellites and signals, better performance. I repeated each test on different days and found the results to be quite consistent.
While in an adjacent state for a different project I brought the gear along and hit some published marks; one in an especially heavy forest (see photo). Here, where VRSNow was available, it defaulted to that first, and while it took several minutes to fix, the results were 3 cm horizontal by 5 cm vertical. Again, the same as the survey rover. For a test of performance in a high multipath environment, I use federal benchmark that is right up against the wall of an old stone building. In VRS Now mode it struggled, but eventually fixed and checked in to 4 cm of the published value. The survey rover did only slightly better within the range of the noise of the data). So, without more extensive testing, I would not be able to determine if there may have been other factors involved. Out in the open, it all seems on par, but may (or may not) be a bit less capable in mixed environments.

Overall Impressions
While not an endorsement, I will say that this type of solution is quite unique, very capable, and very affordable (depending on your business model).
It is designed to work where there is internet connectivity, namely where there is cellular data coverage. This is essential to activate the subscription and access corrections. But once you are connected, it can work offline. For instance, you could activate it when back at the office, and in the field later, in an Offline environment, the DA2 will use RTX L-band satellite data. That would be a drawback for folks who would prefer an IP-based RTK or NTRIP-delivered NTRK solution, but in some remote areas, lack of cell coverage makes that moot—L-Band delivered PPP, like RTX can really shine in such areas. Mobile connectivity is evolving rapidly; cellular seems to work in places where it did not even a few years ago.
It does not come with all of the niceties of high-end rovers, like no-calibration tilt compensation. I do not see a way to collect static observation files for post-processing, but with the SDK I am wondering if some developer is not already working on that option. At this time, I did not find an option to use with high-end survey field software, but again that may only be a matter of time. And if /when it is, I do not see any reason why this could not be used for many, if not all types of surveying tasks, and integrated with other surveying instruments.
The DA2 looks to have been designed to be inexpensive enough to fit into the SaaS value proposition, and it is quite lightweight. It does not have the same kind of solid alloy housing as most high-end rovers. And while I did not want to do a drop test, it does not seem too delicate, and you probably do not have to worry much about durability. There is that one USB cable (to connect it to the battery bank), though I used it in heavy rain, and it did not short out. You have to be sure to push it all the way down on the slip-on pole adapter, to ensure you are getting the correct measure-up. There is also the option for a locking adapter that permanently fixes inside the push-fit mount that can be used with 5/8×11 thread poles if preferred over the push-fit adapter. Otherwise, no major points of pain hardware-wise.
I could see where this solution could be very attractive to the GIS mapping and asset mapping/inventory communities; especially those that use their gear on a sporadic or seasonal basis (for the credits subscription model). Or even those who use it year-round and go monthly. Often there are mapping campaigns where up-front investment costs drive users to look at the very low end, and less precise GNSS rovers. This way the up-front cost is very low, and they only pay for what they use. There is a whole new wave of GNSS rovers that can cost as low as a few thousand dollars, but they do not come with correction services, and generally do not perform as well as top-end rovers. There are still many valid reasons to pay extra for better performance, though this solution seems to have closed that gap somewhat.
I’ll confess that I’m a bit taken by this solution. My inner geek greatly appreciated the first version, mostly for the uniqueness of the solution, but also with how well it performed. This time though, I’m essentially seeing survey-grade performance in many ways. I’m thinking of a meme where my high-end rover is aghast as my heads turns to admire this new system… caught me looking…



Be the first to comment