
Industry and public awareness for commercial applications of UAV technology has increased significantly in Canada and throughout North America. Initially the technology was primarily developed for military use, where the application requirements are different. Design considerations, principally addressing safety concerns, have been necessary for commercial systems. There are fundamentally two types of systems; fixed wing airplane style systems, and a rotary helicopter design. The choice of system is determined by the requirements of a specific application, and the field operating conditions.
UAV Geomatics operates a quadcopter Aeryon Scout system, which has the capabilities necessary to perform the project described herein. The system is built in Canada, has a rugged design, is controlled by a tablet computer for ease of use, and has exceptional flight stability for operating in demanding project conditions.
The Hydrology, Ecology, and Disturbance (HEAD) research group at the Utikuma Region Study Area (URSA) commissioned UAV Geomatics to conduct a complicated mapping survey in a difficult field environment. The group includes researchers from the University of Birmingham UK, McMaster University, University ofAlberta, and Wilfrid Laurier University.
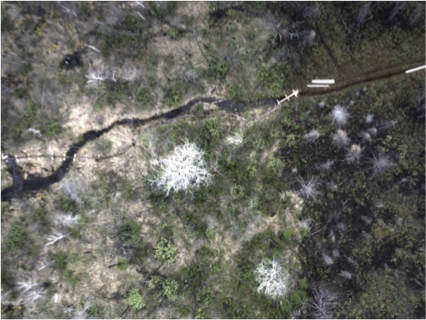
The project area, located 80 km north of Slave Lake Alberta, had been devastated by the wildfires of 2011. The objective was to assess the benefit of high resolution visual and thermal infra-red (IR) data from a low altitude airborne platform, in conjunction with ongoing ground sampling techniques. The visual data provides a detailed orthomosaic of the area, and the IR clearly differentiates between living and burnt trees. In general the investigations involve the “study of peatland vulnerability to wildfire and the spatial organization of trees which provide energy input to the ground surface and burnt peatland”.
http://www.birmingham.ac.uk/schools/gees/people/profile.aspx?ReferenceId=33248
Pre-project planning was performed in Calgary, where occupation schedules and flight grids were defined. Once onsite, access limitations and inclement weather made it necessary to throw away most of the pre-planning and define the program on-the-fly. The planning capabilities of the Aeryon control system make this a relatively straightforward task.


The most difficult site required a hike of 400 metres through a burnt out muskeg area. Access was provided by a boardwalk constructed of 2×8 lumber boards and dead trees. Falling off was not an option. A central location was identified where the Aeryon could be kept within eyesight on three different grids. Take-off from the carrying case would be possible, but a 3 metre square landing pad had to be constructed with the 2×8 lumber. The launch required a 20 metre vertical ascent to clear the trees. Three grids were flown from this location with both visual and IR sensors. A fourth grid was flown from a different location to complete the site.
Muskeg Launch Site



Boardwalk Access

Three other sites were flown on this project. One had not been included in the initial planning; it was added since extra time was available as IR could not be flown on another site. In the pre-planning stage a satellite image is loaded into the flight control system, and used for defining grids, waypoints, and as a visual navigation aid. There was no internet in the area, and cell phone coverage was only available at some spots along the highway. Consequently the navigation aid on the control system was a white screen. A unique capability of the Aeryon is to use the base station and Scout positions to produce a direction and distance reference. Once they are separated by enough distance the two icons indicating their position appear on the white screen. Using this visual reference, a virtual grid was defined by estimating the area to be mapped relative to the two icons. This site had higher tree canopy with a slight overhang. A 35 metre vertical ascent was required, while watching the effect of winds aloft as the Scout came out of tree coverage. Mapping this area was 100% successful on the first attempt.
Visual RGB image Thermal-IR image (approx. same site)


–
Processing the visual data was straightforward, generating orthomosaics and digital terrain models. Processing the IR data was more challenging. Success has been achieved in creating a referenced composite of the data, and it meets the project requirements of the researchers. Work on improving the camera calibration and editing the data is being performed to further improve the results.
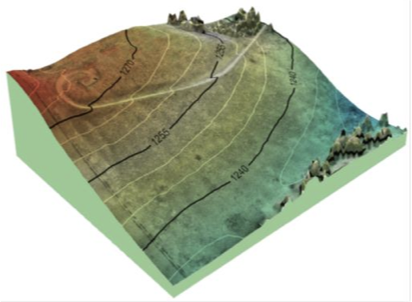
A rotary wing UAV was successfully used to capture visual and IR data on this complex environmental assessment project. The methods are applicable to these requirements in other business sectors, and UAV Geomatics targets these specific services for the oil and gas industry. Application areas range from well site and facility development, oil sands mapping, and environmental applications. Asset lifecycle and construction programs have been specifically defined to address requirements of these fields. A sample of results obtained from UAV O&G mapping is shown below.
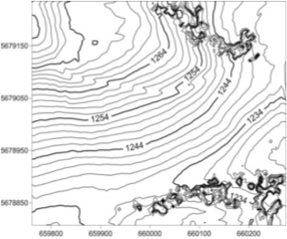
Wellsite orthomosaic

3D Hillshade and contours
Sour gas processing facility


Be the first to comment