
![]()
![]()
What an incredible time to be a mapping professional! Infrastructure the world over continues to change for the better (and worst,) real-world projects are happening everywhere despite our economy being intentionally stagnated, geographic areas continue to change, information is constantly in need of updating (or establishment,) and technology is only making information gathering more accessible, practical and valuable.
A true ‘Frankenstein’ is born; and it’s beautiful!

Simultaneous localization and mapping (SLAM) was born of the robotics industry to answer the question “how do I get a robot to understand its location in an environment as it learns what that environment is?” While seemingly unrelated to geomatics and remote sensing, the answer(s) to this question has been combined with incredible new technologies with even more incredible potential.
In parallel to SLAM, mobile mapping (MM) has been maturing past its standard applications in marine and aerial remote sensing onto roadways by taking super-sensitive, high-accuracy
instruments and refining the aggregate data into a statistically weighted and adjusted product that can be best described as a technological symphony in still-frame. Point clouds and high definition photographs are able to be collected at geospatial confidences better than observations with GNSS alone. This with semi-automatic and automatic processes making information extraction faster, more reliable and with a higher data enrichment potential, mobile mapping is growing in the market of large, high-resolution capture of vast and complex geographic locations.

Like the mythical “Frankenstein’s Monster” or the less intimidating “Mr. Potato head,” both mobile mapping and SLAM systems are made up of other instruments for it components. More than one of any sensor who’s observations can be aligned by time stamp. LiDAR sensor arrays, RGB camera arrays, multispectral arrays, Bluetooth transmission/reception, ground penetrating radar, radio frequency detectors, thermal cameras, sound sensors, light intensity sensors… Essentially, they are software systems that unite sensor observations by synchronizing them and building a mathematically reconstructed path of travel from one, some, or all of these systems, using them as weighted parts of a greater determination, then re-aligning all that data to that refined path of travel for the instrument, called a ‘trajectory.’ This ‘trajectory’ is then used as the final ‘spine’ for the data, with the time stamps of each instrument used to determine where that sensor was at the time its observation was taken.
Mapping the Changing Future of Mapping
From a mapping or survey/construction/architectural professional’s perspective, this technology is not only getting easier to use and faster to collect information with; it’s causing a fundamental shift in thinking towards how accurate and reliable information is collected and opening a brand new horizon in 21st century awareness, planning, and presentation.
Artificial intelligence is only improving the applicability of these systems as solutions are sought and others continue to evolve. From plane and edge detection improving 3D modeling workflows to point cloud classification and evaluation tools turning minutes of work into seconds of review, reality capture systems are making workflows faster while redefining the human element in extracting information from the associated data. SLAM and MM are no exception to this, they’re just doing it faster.
What is the CanSLAM?
The CanSLAM Circuit is a proactive, consumer and student-focused initiative focused around an annual market and performance evaluation. This simple action intends to bring about impactful change and the adoption of SLAM into information capture and extraction workflows. The objectives of the CanSLAM include:
- To annually lift the marketing vale and show you who’s got SLAM or MM systems on the market.
- To identify current applications of SLAM and MM in industry and trigger more innovation.
- To promote first-time success through considerations for adoption; from performance to comfort.
- To provide data sets for evaluation and comparison of a single scene against multiple instruments.
- To bring together manufacturers from all over the world and spark innovation and collaboration.
- Connect students with industry professionals around the world.
- To promote the collected data’s use towards downstream artificial intelligence, computer vision and machine learning solutions.
In a rapidly evolving technological landscape, SLAM and mobile mapping (MM) systems are becoming indispensable tools for a variety of industries because of the pain points that they address:
- Accuracy and Efficiency: Traditional mapping methods can be time-consuming, can require specialized training, and is more prone to errors. SLAM systems provide real-time, accurate mapping data that can be recalled at a user’s discretion with observations and measurements held in context, waiting for review; significantly improving efficiency and reducing the margin for error.
 Complex Environments: Navigating and mapping complex environments such as urban areas or indoor spaces can be challenging. From floor plans to asset inventory and structural assessment, SLAM systems excel in mapping areas otherwise considered to be too complex to be cost effective or practical, offering robust solutions for capturing and storing detailed spatial information.
Complex Environments: Navigating and mapping complex environments such as urban areas or indoor spaces can be challenging. From floor plans to asset inventory and structural assessment, SLAM systems excel in mapping areas otherwise considered to be too complex to be cost effective or practical, offering robust solutions for capturing and storing detailed spatial information.- Cost-Effectiveness: By applying automation to both the mapping collection and extraction processes, SLAM technologies reduce the need for extensive manual labour. Automation can quickly spot inaccuracies or imperfections, reduce reading (translation) error, simplify the data enrichment process, decrease production and turn-around times, increase accuracy and confidence of modeling, and lead to cost savings or improved product for businesses and organizations.

In this, the CanSLAM hopes to create a strong knowledge base for this technology and to become a trusted third-party resource from which unfamiliar organizations, individuals and industries can obtain, compare and contrast information on SLAM and MM systems. The goals of the CanSLAM are straightforward but ambitious:
- Introduce Industry to SLAM Manufacturers. While SLAM technology is new, the concept has been worked on for a while. By creating a platform for interaction, the CanSLAM plans to bridge the gap between technology providers and their potential users. Potential users will have a single source by which to know which instrument providers can be found, their base function, and a data set to sample; manufacturers will have their instruments ‘in the library’ for potential consumers to consider and compare, know what industries are interested in their systems, and provide opportunity for user and industry feedback.
- Encourage Adoption and Application. By identifying applications, return on investment (RoI) potential, impacted industries, and both up-and-coming and newly released units, the CanSLAM means to keep its audience up-to-date with advancements and awash in ideas for SLAM application.
- Empower Consumers. While the greatest potential for loss comes from inexperience and unrealistic expectations, there are many other operational and characteristic questions that need to be asked before selecting a system. Keeping key considerations in mind when selecting a system and make or break and innovative application.
- Provide Free Data Sets. One of the biggest challenges to users and developers of SLAM systems is the lack of sample data that exists for their needs and applications. The CanSLAM means to make all data sets accessible so that they can be evaluated for what’s important to the individual user, rather than being assessed on the merits of a person from a different industry with different standards, expectations and perceptions of ‘value’ in the data. Likewise, this data is used to feed goal six (6.)
- Bring SLAM Manufacturers Together. We mean to have SLAM system manufacturers stand in contrast to each other for the sake of better consumer awareness, but bringing these manufacturers together also opens the opportunity for potential competitors to compare products and development notes. Every unique feature and function is an achievement; by putting performance of all systems on the table, the CanSLAM hopes to accelerate evolution through awareness and collaboration.
- Promote A.I. Downstream Integration. Machine learning and computer vision professionals are all of the same opinion; there isn’t enough sample data for the information desired. This means that there are delays being caused in A.I. application simply by there not being enough sharing. The CanSLAM wants to fill this gap by collecting scenes relevant to a range of industries across post-secondary geomatics schools across Canada.
Now Collecting Data
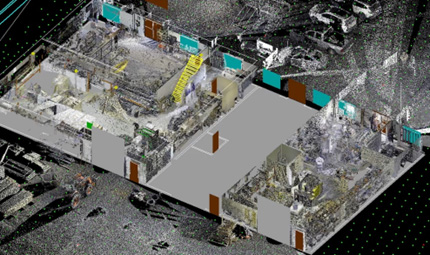
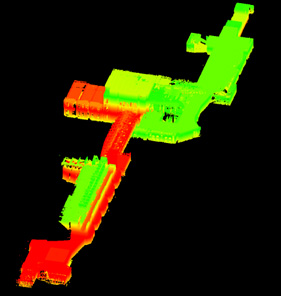
The CanSLAM 2024 is currently open in its Calgary location. The internal scene (SLAM-specific) is available to host scanners (register on our site to arrange a scan time) with the external scene expected to open before the end of the summer. The internal scene is found inside of Heritage Hall on the Southern Alberta Institute of Technology’s main campus with the external course being built along the road network around it.
While more information can be found on the CanSLAM website, the instructors and students at SAIT established a high precision control network using total stations and first order leveling (report to be released with data.) The site was selected because of the architectural complexity with a large number of windows and semi-transparent surfaces, large open spaces, gentle inclines, and multi-floor design. The course was designed to maximize testing surfaces and scenarios while keeping scanning area small enough to keep a generally ‘manageable’ data set.
All participants are invited to go through the site with their scanners and collect the scene as completely as possible. Once complete, ground control point (GCP) values are given to the participants and they align their scans to the values given at the appropriate locations. From here, all onboard scanner data and post-processed data is handed over to the CanSLAM for dissemination and evaluation.
To date, Kudan USA scanned the course with their “Dev Kit” in early August with R-E-A-L.iT following with the Leica BLK2GO August 20, 2024. Information about participants and participation events/times can be found on the CanSLAM blog or by following the CanSLAM Circuit on LinkedIn or Facebook.
CanSLAM Data Presentation
All data collected for the CanSLAM is evaluated by industry and student professionals. Together, we evaluate the scenes submitted and discuss the results before compiling our observations and findings into an annual report and presentation, to be presented on the last day of the National GoGeomatics Expo in Calgary, October 28-30, 2024.
We look forward to seeing you there!
CanSLAM Industry Impact
T![]()
![]() he CanSLAM Circuit is committed to cutting through marketing hype and providing an impartial resource for those interested in SLAM technology. By offering a platform for manufacturers to showcase their products and for industry professionals to learn and evaluate data sets, this event helps ensure realistic performance expectations and successful investments!
he CanSLAM Circuit is committed to cutting through marketing hype and providing an impartial resource for those interested in SLAM technology. By offering a platform for manufacturers to showcase their products and for industry professionals to learn and evaluate data sets, this event helps ensure realistic performance expectations and successful investments!
In summary, the CanSLAM Circuit is a vital event for the geomatics community, providing a comprehensive overview of current SLAM and MM capabilities, fostering industry collaboration, and promoting the responsible adoption of cutting-edge mobile mapping solutions.
Now Collecting Donations
The CanSLAM has lofty visions for the students, industry members and manufacturers/distributors who participate with us, but we have to start small. Keeping the CanSLAM and its results open and free to access involves covering administrative costs through generous giving. The CanSLAM cannot exist without support from the community and its interested/potential users; people like you!
If you, your company, organization or interest group is interested in supporting the CanSLAM or its initiatives please contact the CanSLAM at [email protected].
Thank you to our sponsors!
Platinum


Silver
![]()
![]()
![]()
![]()




Be the first to comment