

NATIONAL ELEVATION DATA STRATEGY UPDATE
July 2020
STATUS OF THE LIDAR ACQUISITIONS
The National Elevation Data Strategy team of the Canadian Centre for Mapping and Earth Observation (CCMEO) continues its work to provide Canadians with an accurate three-dimensional representation of the country in support of government priorities. High quality 3D data allows us to serve Canadians and support key federal priorities such as flood mapping, forestry, climate change, agriculture, infrastructure planning, and mining. Through this strategy, NRCan has become the Government of Canada’s centre of expertise for topographic LiDAR. With its unique expertise within the Government of Canada, the team supports several departments in the acquisition, processing and dissemination of LiDAR data.
In the coming weeks, the team will complete the implementation of LiDAR contracts for the 2020 season. For the moment, 4 contracts have been managed by the team (see table and image below). These contracts are located in 5 provinces.
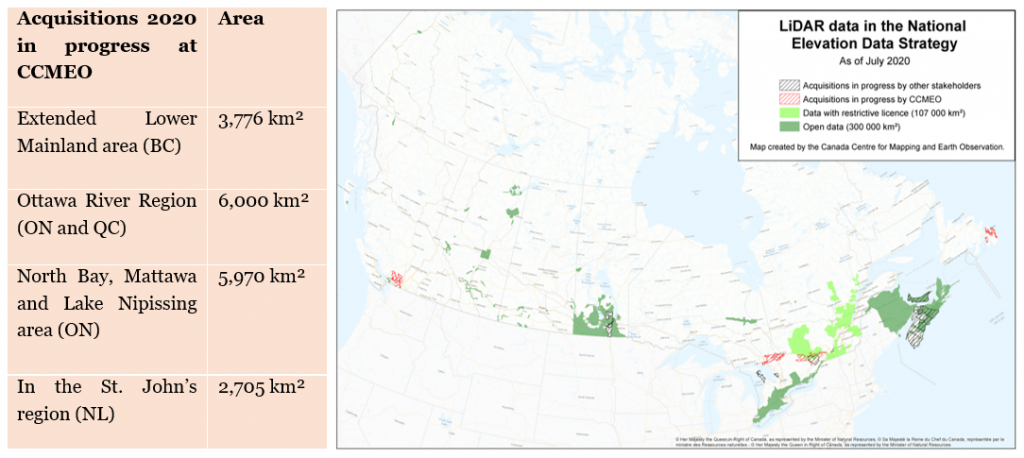
With the current acquisitions, the LiDAR coverage in the National Elevation Data Strategy will include 400,000 km2 including 55 of the 100 largest Canadian cities. This work has been accomplished through the collaboration of several partners such as federal departments, provinces, territories, and municipalities.
DEEP LEARNING METHOD TO AUTOMATE THE AIRBORNE LIDAR POINT CLOUD CLASSIFICATION
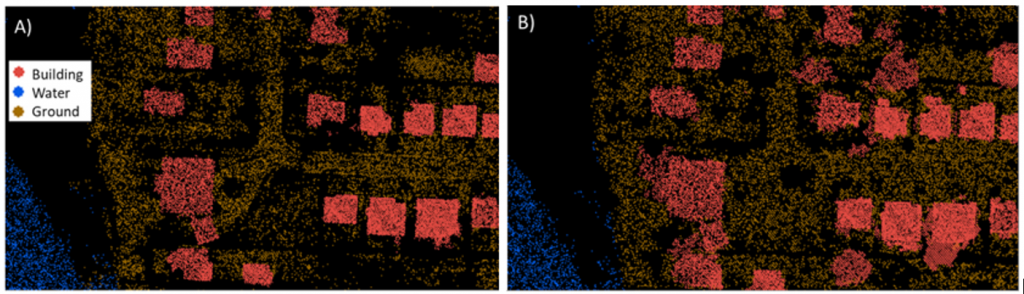
The availability of airborne LiDAR data is rapidly increasing and the classification process, which assigns a land use class to each point, is difficult for some classes such as buildings, water bodies and vegetation. The quantity and non-homogeneous distribution of points greatly complicates the automation of this task. This step requires significant manual intervention in order to correct the classification performed automatically, thereby increasing the valorizing cost of this data. The success of deep learning algorithms in computer vision is undeniable and has led to a revolution in various fields, such as satellite image processing. These successes have inspired various researches on point cloud classification.
To that end, a research in collaboration with Université de Sherbrooke, the Center for Research in Informatics of Montréal (CRIM) and NRCan aims to use a deep learning method to automate the airborne LiDAR point cloud classification process. The objectives of this research are to identify the most suitable architecture, evaluate the required nominal point density and the use of additional information on point clouds, such as return intensity and return number. The preliminary results are very encouraging and demonstrate the potential of these algorithms to accomplish this task.
CREATING A HYDROLOGICALLY CONDITIONED DEM
This year, NRCan is developing an approach to automatically generate hydro-conditioned DEMs from LiDAR point clouds. NRCan has implemented an algorithm to automatically detect culverts from digital elevation models. This method has been tested over 2500 km2 on six study sites located in St-Raymond-de-Portneuf (QC), Stoneham (QC), Upper Kingsclear (NB), Petitcodiac (NB), Peterborough (ON) and Saint-Pierre-Jolys (MB). Theses culverts can then be “burned” on a digital elevation model to create realistic flow path. Research is ongoing to determine the best way to complete the conditioning. As part of this work, NRCan is working on an approach to divide watersheds in hydrologically consistent sub-watersheds. Results of this work will help with flood mapping and other hydrological analysis. NRCan continues to work on this project, and on the development of a technical specification for hydro-conditioned DEMs, in collaboration with other federal departments, provinces and territories and academia. Interested to work with us? Reach out to us at NRCan.elevation-elevation.RNCan@canada.ca
NEW ELEVATION PRODUCTS
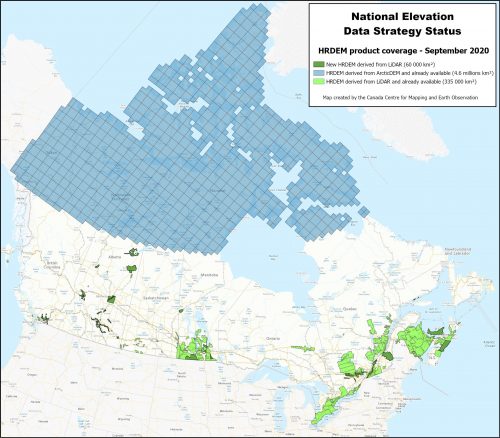
In September 2020, a new publication of the Digital Elevation Model High Resolution (HRDEM) product will be released on the Open Maps site. This new version will cover a total area of nearly 400 000 km² of LiDAR-derived HRDEM, an increase of 60,000 km² since the last update in October 2019. It will cover new areas in Alberta, British Columbia, Manitoba, Ontario, Quebec, Nova Scotia and Prince Edward Island (see image below). In addition, in the fall, NRCan will make available a continuous mosaic of HRDEM data. The mosaic will be produced using the most up-to-date HRDEM data available from NRCan. This new product will be implemented to facilitate navigation and interaction with the best elevation data in Canada. This mosaic will be disseminated using NRCan’s recently implemented Topographic Data Cube, which uses geospatial big data management technologies. These technologies enable the rapid and efficient visualization of high-resolution geospatial data and allow for the rapid generation of dynamically derived products. With the Topographic Data Cube, the mosaic will be available from web mapping services such as Web Map Service (WMS) and Web Coverage Service (WCS).
VERSION 2.1 OF THE FEDERAL AIRBORNE LIDAR DATA ACQUISITION GUIDELINE
In the fall of 2020, NRCan will release a new version of the Federal Airborne LiDAR Data Acquisition Guideline. This new version will include a new appendix on best practices for topobathymetric LiDAR data acquisition. Various changes will also be made to the guide to facilitate its use and to correct some minor anomalies. This new version of the guide is in line with NRCan’s commitment to make it evolve in accordance with advances and trends in the field of airborne LiDAR in Canada and internationally.
Link to the original publication: EN: https://doi.org/10.4095/326942 , FR: https://doi.org/10.4095/326943
We need your feedback!
Do not hesitate to provide us with comments and concrete examples of how you use the data. This helps us to stay relevant and demonstrate the importance of the strategy. You can email us at:
NRCan.elevation-elevation.RNCan@canada.ca
The authors of the articles are:
David Bélanger
Charles Papasodoro
Mathieu Turgeon-Pelchat
Jean-Samuel Proulx-Bourque
Catherine Vachon




