
The Geo Week exhibition and conference, held in Denver Colorado, February 13-15, attracted 3,000 attendees from over 50 countries. And over 175 exhibitors. Here’s a few highlights from the geo-coolness in the exhibit hall and keynote insights.
There were almost too many exhibits to visit during the 3 days of the event. There was an excellent mix of geomatics and reality capture hardware and software. While some fellow attendees commented that there seemed to be an inordinate number of UAV/UAS/RPAS (OK, drone) booths, I found that many of these were focused on payloads and software for UAS applications, rather than just the UAV platforms we saw so much of (perhaps too much) in UAS shows years ago. However, one UAV platform did stand out…

Hydrogen Powered UAV
Doosan Mobility Innovation displayed a hydrogen fuel cell powered multi-rotor UAV. It’s a large platform, but even with the heavy fuel cell, you can add a 10Kg lidar unit, keep it in the air for 2 hours of more, and still be under the FAA Part 1207 55Kg limit. Well suited for large and remote projects where there might not be a lot of infrastructure. They also have a fixed wing model, and cell charging options.
Streamlining Boresighting
Now that reality capture is much more inexpensive and easier to do compared to years ago, we do face the hazard that not every one of the new users are adhering to best practices. Like proper steps to calibrate the data. I once asked an audience of geospatial people how many did drone imaging/lidar or mobile mapping (quite a few), and then how many do “boresighting” (very few… yikes!). To help streamline such essential operations, the folks at OxTS (Oxford Technology Solutions) have added a simple step by step boresighting tool to their Georeferencer suite that they say takes only about 10 minutes to teach someone.
This OxTS tool impressed the judges of the annual Geo Week “Pitch the Press” event (we were among the judges), and was one of three winners among 16 who did rapid, 2-minute pitches. It was a lot of fun, kind of like a “Geo Shark Tank”. Read about the winners here.

OxTS also designs and manufactures modular IMU components, for integration into reality capture sensor systems. And, as lidar assist for positioning is really catching on, they have a nice modular lidar component as well as many other navigation and positioning aiding sensors and software tools.
Flash and Solid State Lidars
Flash lidar gets a lot of press for how it is used for autonomy and robotics. It is not to be confused with other forms of solid state lidar like MEMS-based solid state lidar (which can still have moving parts) or true solid state lidar, that does a beam-forming-like method to do a swath with no moving parts. Flash lidar illuminates a wide area and can detect light simultaneously from thousands of different directions, almost like a camera. And various applications do comparisons between these “images”, so if you are moving rapidly towards something (as a vehicle or robot might do) you get instantaneous spatial data on which to drive decision points.
However, when it comes to geomatics and many geospatial applications, we often think of the conventional (often spinning) laser scanners. There is some movement into the geo space from both solid state and flash lidar. For instance, exhibitor XenomatiX showed their solid state lidar system for roadway/pavement management.
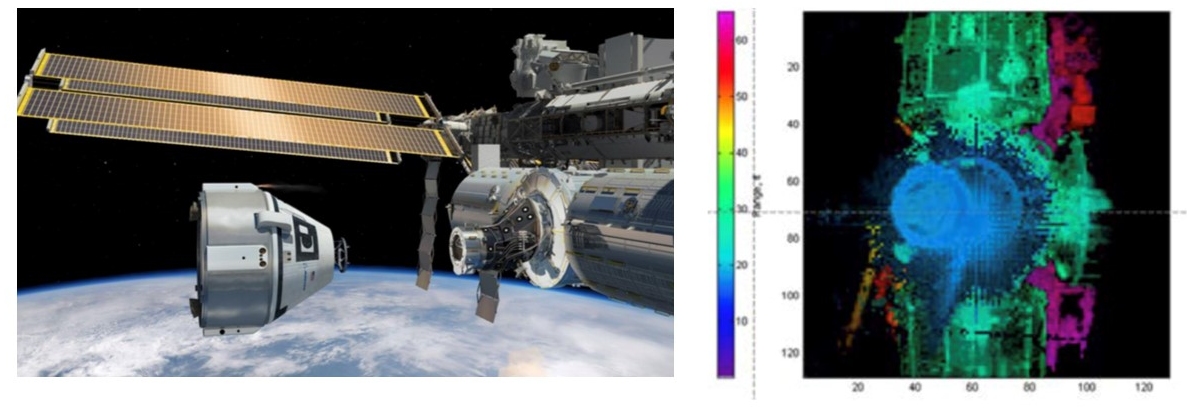
And Advanced Scientific Concepts (ASC) exhibited some of their flash lidar units that are used for a very wide range of applications. Their systems have been deployed for planetary space missions, space docking systems, in-flight refueling, and more. What these can do, as opposed to the “regular” lidar we in the geospatial sector use for reality capture, is real-time applications, like those mentioned above. And their global shutter flash lidar can be used for certain underwater operations. Also, think about AEC applications like real-time construction site change management and safety.
And just for fun, I queried several of the big geo manufacturers on when we might see solid state lidar in say, survey rovers, for limited scanning. And could that be used for position assurance (much I the same way as IMUs). Got some grins and evasive answers. Hmmm…

Modular Cameras
Remember those (often cheesy) all-in-one stereos from the 1980s? Well, true music aficionados preferred component systems. Something similar is going on in the realm of reality capture. Mixing and matching of sensors provides much more flexibility. One misgiving folks have about some of the canned mobile mapping systems is the limitations of their cameras. But now, if you want to add a more capable set of cameras, you can.
For instance, Mosaic had their Mosaic X on display, as 13K resolution, 360° -6-camera system that requires no computer—it has built-in CPUs. They said that customers often integrate these with Riegl lidar systems. They also have 12K and 22K resolution systems.

Pods and Sensor Packs
If someone does not want to build-their-own, and are looking for a prepackaged, but small and easy to deploy lidar, there were several nifty systems to choose from. Viametris has their MS-96, a compact system with dual scan heads, GNSS, MEMS IMU, SLAM capability, and it can be easily attached to a vehicle, backpack, and I could imagine a robo-dog (or real one).
A year ago, we reported on a trend in aerial mapping: a renewed interest in crewed systems. We saw more evidence of this at Geo Week, with new sensors, software, stabilization systems and gimbals, and a neat small pod by Aispeco (displayed at the booth of Baam Tech). Designed for easy belly, pole, or strut mounts for small aircraft and helicopters, you can mix and match up to 9 different sensor configurations. This can include Riegl VUX lidar units, Sony and Phase One cameras, and Applanix or NovAtel IMU cards.

Green Laser
Finding green laser lidar for topo bathymetry that is compact enough for heavy-drone operations, and (reasonably) affordable is a challenge. Riegl has recently announced their VQ-840-GL that fits that category. It can carry an optional digital camera, and has a visible green laser that shoots in an elliptical pattern, as opposed to most liner aerial lidar. Riegl’s My Linh Truong explained that an elliptical pattern is most common for bathymetry lidar to keep a consistent incidence angle to the water.
While they did not have one of the new models on display, Truong demonstrated how compact and light it was by holding up a similar model for the photo. It fits on their RiCOPTER-M, and at under 10Kg, would work with other UAV’s and still be under the FAA Part 1207 55Kg limit.
Keynotes
OK, so I tend to geek out in exhibition halls, like at INTERGEO. Geo Week though, also included many great educational sessions, product showcases, keynotes, and industry panels. All the more reason to attend sometime. There were outstanding, very notable-quotable keynote addresses. The keynote on the first day was a panel titled “How Ready is the AEC Industry for Digitization?”

Claire Rutkowski, VP and CIO, Bentley Systems, had some advice on paths to AEC Digitization:
- Assess what tools you have, like your software suites and subscriptions; you may be underutilizing these.
- Check with your existing software and solutions vendor; they may have what you need.
- Technology projects are not really just technology projects, they are “change” projects.
- You may need to take away the ability to just keep doing it the old way. But also incentivize the change.
Read more in our extended interview with Claire Rutkowski about AEC digitization strategies in uncertain times.

Steve Jones, Senior Director, Dodge Data & Analytics in his opening remarks in the keynote panel: “It’s good to have BIM tools, however the benefits are not substantially realized until you more deeply utilize them. Adoption has been quite uneven, despite the huge rise in 3rd party investment into the development of Contech (construction technology).

On the question of scalability in the digitization of AEC, Danielle O’Connell, Sr. Director, Emerging Tech, Skanska USA pointed out that one successfully piloted solution cannot scale well unless it can integrate with many other solutions. An important question for any solution provider is “can it integrate with…?”
The second day keynote was given by non-other than Esri president and co-founder jack Dangermond:
“The work of the geospatial community addresses all of the key world challenges.” He told the audience that they are in the “understanding” business—the understanding that at leads to action. He said that among the biggest challenges the world faces is a lack of understanding, which exacerbates an unwillingness to collaborate. But with advances in tools to build understanding and match science to action, what he calls the “geographic approach” is making a difference. He added: “Geospatial infrastructure is becoming like a global nervous system. And a BIM model for example can be a 3D transaction in a unified reality model, survey grade GIS.”



Be the first to comment